





Tutti i prodotti
-
Azionamento variabile di frequenza di VFD
-
inverter a frequenza variabile
-
Invertitore di PMSM
-
220v introdotto invertitore ha prodotto 380v
-
Invertitore solare della pompa di monofase
-
regolatore della pompa solare
-
Invertitore solare della pompa di MPPT VFD
-
Dispositivo d'avviamento molle del motore
-
Reattore dell'invertitore
-
Resistenza di frenaggio di VFD
-
Filtro da VFD
-
Invertitore solare della pompa di 3 fasi
-
 Tayfun dalla Turchial'invertitore solare della pompa è realmente molto nella buona qualità ed inoltre abbiamo preparato alcuni prodotti promozionali per la mostra. Stiamo andando fare i nuovi ordini presto. L'anno scorso c'era soltanto un agente locale e questo anno, c'è più di 8. Alcuni di loro soltanto vendere Veikong!
Tayfun dalla Turchial'invertitore solare della pompa è realmente molto nella buona qualità ed inoltre abbiamo preparato alcuni prodotti promozionali per la mostra. Stiamo andando fare i nuovi ordini presto. L'anno scorso c'era soltanto un agente locale e questo anno, c'è più di 8. Alcuni di loro soltanto vendere Veikong! -
 Cristian dal CileÈ molto buono! Le opzioni LCD lo rendono molto più facile usare. Quello è il forte punto, facile di uso. E robusto. Grande software del PC.
Cristian dal CileÈ molto buono! Le opzioni LCD lo rendono molto più facile usare. Quello è il forte punto, facile di uso. E robusto. Grande software del PC. -
 Brahim assad dalla SiriaLa frequenza dell'uscita VFD500 è stabile quando le altre stanno oscillando. Inoltre la corrente d'uscita è di meno che altre, ecco perché frequenza dell'uscita sono più alte ugualmente che può risparmiare più energia.
Brahim assad dalla SiriaLa frequenza dell'uscita VFD500 è stabile quando le altre stanno oscillando. Inoltre la corrente d'uscita è di meno che altre, ecco perché frequenza dell'uscita sono più alte ugualmente che può risparmiare più energia.
Persona di contatto :
Terry
Numero di telefono :
008613910001000
WhatsApp :
+8613923735888
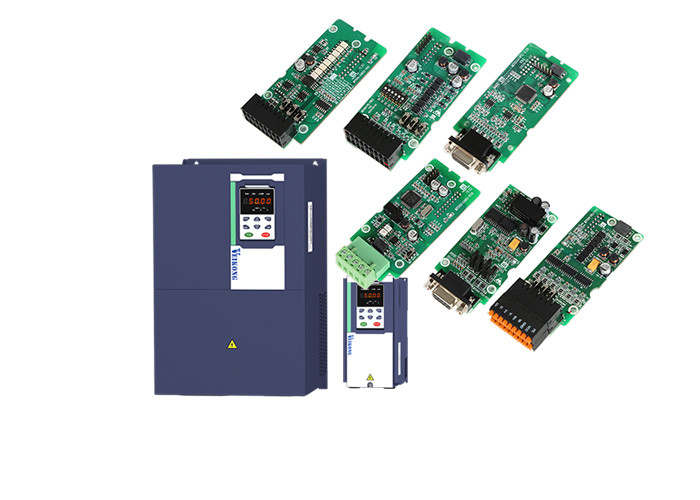
Azionamento variabile trifase 30kw 40hp di frequenza di monofase VFD








| Luogo di origine | La CINA |
|---|---|
| Marca | VEIKONG |
| Certificazione | CE, ROHS |
| Numero di modello | VFD500-030G/037GT4B |
| Quantità di ordine minimo | 1 |
| Prezzo | Please contact quotation |
| Imballaggi particolari | l'invertitore di <45kw è pacchetto usato del cartone, ≥45kw è pacchetto di legno usato di caso |
| Tempi di consegna | dipende dalle quantità |
| Termini di pagamento | T/T, Western Union, L/C |
| Capacità di alimentazione | 1000 UNITÀ A SETTIMANA |
Dettagli
| Tensione | 380V/220V | Potere | 30Kw/40hp |
|---|---|---|---|
| Modo di controllo | Controllo di V/F, controllo di vettore | Livello di protezione | IP20/IP65 |
| Communciaton | Modbus485 Canopen Profinet | Tastiera | Tastiera del LED, tastiera LCD, tastiera doppia dell'esposizione |
| Evidenziare | Azionamento variabile 30kw di frequenza di VFD,Azionamento variabile 3 40hp di frequenza di VFD,Vfd di monofase 40hp |
||
Descrizione di prodotto
monofase trifase variabile dell'azionamento VFD di frequenza di 30kw 40hp 220v 380v
Dati tecnici di VEIKONG VFD500:
| Oggetto | Specifiation | |
| Input | Tensione di Inuput |
1phase/3phase 220V: 200V~240V 3 fase 380V-480V: 380V~480V |
| Gamma di fluttuazione permessa di tensione | -15%~10% | |
| Frequenza introdotta | 50Hz/60Hz, fluttuazione meno di 5% | |
| Uscita | Tensione in uscita | 3phase: tensione 0~input |
| Capacità di sovraccarico |
Applicazione per tutti gli usi: 60S per 150% della corrente nominale Applicazione leggera del carico: 60S per 120% della corrente nominale |
|
| Controllo | Modo di controllo |
Controllo di V/f Controllo di vettore di cambiamento continuo di Sensorless senza carta della PAGINA (SVC) Controllo di vettore di cambiamento continuo di velocità del sensore con la carta della PAGINA (VC) |
| Modo operativo | Controllo di velocità, controllo di coppia di torsione (SVC e VC) | |
| Gamma di velocità |
1:100 (V/f) 1:200 (SVC) 1:1000 (VC) |
|
| Accuratezza di controllo di velocità |
±0.5% (V/f) ±0.2% (SVC) ±0.02% (VC) |
|
| Risposta di velocità |
5Hz (V/f) 20Hz (SVC) 50Hz (VC) |
|
| gamma di frequenza |
0.00~600.00Hz (V/f) 0.00~200.00Hz (SVC) 0.00~400.00Hz (VC) |
|
| Risoluzione introdotta di frequenza |
Regolazione di Digital: 0,01 hertz Regolazione analogica: frequenza massima x 0,1% |
|
| Coppia di torsione di partenza |
150%/0.5Hz (V/f) 180%/0.25Hz (SVC) 200%/0Hz (VC) |
|
| Accuratezza di controllo di coppia di torsione |
SVC: all'interno di 5Hz10%, superiore a 5Hz5% VC: 3,0% |
|
| Curva di V/f |
V / tipo della curva di f: linea retta, multipunto, funzione di potenza, separazione f/di V; Supporto di spinta di coppia di torsione: Spinta automatica di coppia di torsione (prestabilire), spinta manuale di coppia di torsione |
|
| Frequenza che dà rampa |
Supporto lineare ed accelerazione e decelerazione di curva ad S; 4 gruppi di tempo di decelerazione e di accelerazione, campo di regolazione 0.00s ~ 60000s |
|
| Controllo di tensione della sbarra collettrice di corrente continua |
Controllo della stalla di sovratensione: limiti la produzione di energia del motore regolando la frequenza dell'uscita per evitare saltare l'errore di tensione;
Controllo della stalla di Undervoltage: controlli il consumo di energia del motore regolando la frequenza dell'uscita per evitare il guasto della deviazione della rotta
Controllo di VdcMax: Limiti la quantità di potere generata dal motore regolando la frequenza dell'uscita per evitare il viaggio di sovratensione; Controllo di VdcMin: Controlli il consumo di energia del motore regolando la frequenza dell'uscita, per evitare l'errore di undervoltage di salto |
|
| Frequenza portante | 1kHz~12kHz (varia secondo il tipo) | |
| Metodo di partenza |
Inizio diretto (può essere il freno sovrapposto di CC); inizio d'inseguimento di velocità |
|
| Metodo di arresto | Fermata di decelerazione (può essere la CC sovrapposta che frena); libero di fermarsi | |
| Funzione di Maincontrol | Pareggi il controllo, controllo di abbassamento, l'operazione delle fino a 16 velocità, l'evitare pericoloso della velocità, l'operazione di frequenza dell'oscillazione, accelerazione e commutazione di tempo di decelerazione, la separazione di VF, sopra l'eccitazione che frena, controllo di PID di processo, dorma e funzione di sveglia, logica semplice incorporata dello SpA, terminali virtuali di uscita ed introdotta, unità di ritardo incorporata, unità incorporata di confronto ed unità di logica, backup di parametro e recupero, l'annotazione perfetta dell'errore, la risistemazione di errore, due gruppi di motore che parametersfreeswitching, i collegamenti dell'uscita dello scambio del software, SU/GIÙ dei terminali | |
| Funzione | Tastiera | Tastiera del LED Digital e tastiera LCD (opzione) |
| Comunicazione |
Norma: Comunicazione di MODBUS PUÒ APRIRSI E PROFINET (IN VIA DI SVILUPPO) |
|
| Carta della PAGINA | Carta di interfaccia incrementale del codificatore (uscita differenziale e collettore aperto), carta del trasformatore rotante | |
| Terminale introdotto |
Norma: 5 terminali dell'input digitale, uno di cui sostiene l'input ad alta velocità di impulso fino a 50kHz; 2 terminali dell'entrata analogica, supporto 0 ~ input o 0 di tensione 10V ~ input corrente 20mA; Carta di opzione: 4 terminali dell'input digitale 2 input di tensione dell'entrata analogica terminals.support-10V-+10V |
|
| Terminale di uscita |
norma: 1 terminale di uscita digitale; 1 terminale di uscita ad alta velocità di impulso (tipo aperto) del collettore, supporto 0 ~ uscita del segnale dell'onda quadra 50kHz; 1 terminale di uscita del relè (il secondo relè è un'opzione) 2 terminali di uscita analogica, supporto 0 ~ uscita corrente 20mA o 0 ~ uscita di tensione 10V; Carta di opzione: 4 terminali di uscita digitale |
|
| Protezione | Riferisca al capitolo 6" risoluzione dei problemi e contromisure» per la funzione della protezione | |
| Ambiente | Posizione dell'installazione | Dell'interno, nessun luce solare diretta, polvere, gas corrosivo, gas combustibile, fumo dell'olio, vapore, gocciolamento o sale. |
| Altitudine | 0-3000m.inverter sarà ridotto le imposte su se l'altitudine più alta corrente della potenza nominale e di than1000m ridurrà di 1% se aumento di altitudine di 100m | |
| Temperatura ambiente | -10°C~ +40°C, diminuzione corrente (ridotto le imposte su se la temperatura ambiente è fra 40°C e 50°C) della potenza nominale massima 50°C entro 1,5% se aumento di temperatura da 1°C | |
| Umidità | Di meno che 95%RH, senza condensare | |
| Vibrazione | Meno di 5,9 m/s2 (0,6 g) | |
| Temperatura di stoccaggio | -20°C ~ +60°C | |
| Altri | Installazione | A gabinetto fissato al muro e controllato a pavimento, transmurale |
| Livello di protezione | IP20 | |
| metodo di raffreddamento | Raffreddamento ad aria forzata | |
| Contabilità elettromagnetica | CE ROHS |
Filtro interno da contabilità elettromagnetica Aderisce a EN61800-3 Categoria C3 terzo ambiente |
Sostituisca il vfd famoso di marche nell'applicazione generale.
![]()
Funzione di PID
| Funzione di PID di 40 gruppi | ||||
| r40.00 | Valore finale dell'uscita di PID | Sola unità colta: 0,1% | - | ● |
| r40.01 | Valore stabilito finale di PID | Sola unità colta: 0,1% | - | ● |
| r40.02 | Valore finale di risposte di PID | Sola unità colta: 0,1% | - | ● |
| r40.03 | Valore di deviazione di PID | Sola unità colta: 0,1% | - | ● |
| P40.04 | Fonte di riferimento di PID |
La cifra dell'unità: Fonte di riferimento principale di PID (ref1) 0: Regolazione di Digtital 1: AI1 2: AI2 3: AI3 (scheda di espansione di IO) 4: AI4 (scheda di espansione di IO) 5: Impulso ad alta frequenza di HDI 6: Comunicazione La cifra di Ten: Fonte di riferimento di PID Auxilary (ref2) stessi come cifra dell'unità |
00 | ☆ | |||||||||||||||
| P40.05 | Gamma di risposte data PID | 0.01~655.35 | 100,00 | ☆ | |||||||||||||||
| P40.06 | Regolazione digitale 0 di PID | 0.0~P40.05 | 0,0% | ☆ | |||||||||||||||
| P40.07 | Regolazione digitale 1 di PID | 0.0~P40.05 | 0,0% | ☆ | |||||||||||||||
| P40.08 | Regolazione digitale 2 di PID | 0.0~P40.05 | 0,0% | ☆ | |||||||||||||||
| P40.09 | Regolazione digitale 3 di PID | 0.0~P40.05 | 0,0% | ☆ | |||||||||||||||
|
Quando la fonte di riferimento di PID è la regolazione digitale, la regolazione digitale 0~3 di PID dipende dalla funzione 43 di DI terminal (prestabilisca il terminale di PID I) e 44 (terminale di PID di preregolamento 2):
Per esempio: Quando AI1 è usato come risposte di PID, se la gamma completa corrisponde a pressione 16.0kg e richiede il controllo di PID di essere 8.0kg; poi la gamma stabilita a 16,00, terminale digitale di risposte di P40.05 PID di riferimento di PID scelto a P40.06, ha messo P40.06 (regolazione 0 di preregolamento di PID) per essere 8,00
|
|||||||||||||||||||
|
Quando la fonte di riferimento di PID è la regolazione digitale, la regolazione digitale 0~3 di PID dipende dalla funzione 43 di DI terminal (prestabilisca il terminale di PID I) e 44 (terminale di PID di preregolamento 2):
Per esempio: Quando AI1 è usato come risposte di PID, se la gamma completa corrisponde a pressione 16.0kg e richiede il controllo di PID di essere 8.0kg; poi la gamma stabilita a 16,00, terminale digitale di risposte di P40.05 PID di riferimento di PID scelto a P40.06, ha messo P40.06 (regolazione 0 di preregolamento di PID) per essere 8,00
|
||||||||||||||||||||
| P40.10 | Selezione di fonte di riferimento di PID | 0: ref1 1: ref1+ref2 2: ref1-ref2 3: ref1*ref2 4: ref1/ref2 5: Min (ref1, ref2) 6: Massimo (ref1, ref2) 7 (ref1+ref2)/2 8: cambiamento di fdb1and fdb2 |
0 | ☆ | ||||||||||||||||
| P40.11 | Risposte source1 di PID |
La cifra 0 dell'unità: Risposte source1 (fdb1) di PID 0: AI1 1: AI2 2: AI3 (carta di opzione) 3: AI4 (carta di opzione) 4: PLUSE (HDI) 5: Comunicazione 6: Corrente della potenza nominale del motore 7: Frequenza della potenza nominale del motore 8: Coppia di torsione della potenza nominale del motore 9: Frequenza della potenza nominale del motore La cifra di Ten: Risposte source2 (fdb2) di PID Stessi come cifra dell'unità |
00 | ☆ | ||||||||||||||||
| P40.13 | Selezione di funzione di risposte di PID | 0: fdb1 1: fdb1+fdb2 2: fdb1-fdb2 3: fdb1*fdb2 4: fdb1/fdb2 5: Il min (fdb1, fdb2) prende a fdb1.fdb2 il valore più poco elevato 6: Massimo (fdb1, fdb2) prenda a fdb1.fdb2 il più grande valore 7: (ref1+ref2)/2 8: cambiamento di fdb1and fdb2 |
0 | ☆ | ||||||||||||||||
| P40.14 | Caratteristica dell'uscita di PID |
0: L'uscita di PID è positiva: quando il segnale di ritorno supera il valore di riferimento di PID, la frequenza dell'uscita dell'invertitore diminuirà per equilibrare il PID. Per esempio, il controllo di PID di sforzo durante il sommario 1: L'uscita di PID è negativa: Quando il segnale di ritorno è più forte del valore di riferimento di PID, la frequenza dell'uscita dell'invertitore aumenterà per equilibrare il PID. Per esempio, il controllo di PID di sforzo durante il wrapdown |
0 | ☆ | ||||||||||||||||
|
La caratteristica di uscita di PID è determinata da P40.14 e dal positivo di PID di funzione di Di terminal 42/commutazione negativa: P40.14 = 0 e «42: Terminale di commutazione positivo/negativo di PID» è invalido: : La caratteristica di uscita di PID è positiva P40.14 = 0 e «42: Terminale di commutazione positivo/negativo di PID» è valido: : La caratteristica di uscita di PID è negativa P40.14 = 1 e «42: Terminale di commutazione positivo/negativo di PID» è invalido: : La caratteristica di uscita di PID è negativa P40.14 = 1 e «42: Terminale di commutazione positivo/negativo di PID» è valido: : La caratteristica di uscita di PID è positiva |
||||||||||||||||||||
| P40.15 | Limite superiore dell'uscita di PID | -100.0%~100.0% | 100,0% | ☆ | ||||||||||||||||
| P40.16 | limite inferiore dell'uscita di PID | -100.0%~100.0% | 0,0% | ☆ | ||||||||||||||||
| P40.17 | Guadagno KP1 di Proportaional |
0.00~10.00 La funzione si applica al guadagno proporzionale P dell'input di PID. La P determina la forza di intero regolatore di PID. Il parametro di 100 significa che quando il contrappeso di risposte di PID e del valore dato è 100%, l'immagine di regolazione del PID regola è la frequenza massima (trascurando funzione integrale e funzione differenziale).
|
5,0% | ☆ | ||||||||||||||||
| P40.18 | Tempo integrale TI1 |
0.01s~10.00s Questo parametro determina la velocità del regolatore di PID per effettuare l'adeguamento integrale sulla deviazione di risposte e di riferimento di PID. Quando la deviazione di risposte e di riferimento di PID è 100%, il regolatore integrato funziona continuamente dopo il momento (trascurando l'effetto proporzionale ed effetto differenziale) di raggiungere la frequenza massima (P01.06) o la tensione massima (P12.21). Più breve il tempo integrale, più forte è adeguamento
|
1.00s | ☆ | ||||||||||||||||
| P40.19 | Tempo differenziale TD1 |
0.000s~10.000s Questo parametro determina la forza del rapporto del cambiamento quando il regolatore di PID effettua l'adeguamento integrale sulla deviazione di risposte e di riferimento di PID. Se le risposte di PID cambiano 100% durante il tempo, l'adeguamento del regolatore integrato (trascurando l'effetto proporzionale ed effetto differenziale) è la frequenza massima (P01.06) o la tensione massima (P12.21). Più lungamente il tempo integrale, più forte è la regolazione.
|
0.000s | ☆ | ||||||||||||||||
| P40.20 | Guadagno KP2 di Proportaional | 0.00~200.0%. | 5,0% | ☆ | ||||||||||||||||
| P40.21 | Tempo integrale TI2 |
0.00s (non qualsiasi effetto integrale) ~20.00s
|
1.00s | ☆ | ||||||||||||||||
| P40.22 | Tempo differenziale TD2 | 0.000s~0.100s | 0.000s | ☆ | ||||||||||||||||
| P40.23 | Stato di cambiamento di parametro di PID |
0: nessun cambiamento Non commuti, uso KP1, TI1, TD1 Commutatore da DI terminal KP1, TI1, TD1 sono usati quando la funzione di no. 41 di DI terminal è invalida; KP2, TI2, TD2 sono usati una volta validi Il valore assoluto di comando di PID e di deviazione di risposte è più di meno di P40.24, facendo uso di KP1, TI1, TD1; il valore assoluto di deviazione è maggior di P40.25, facendo uso di KP2, TI2, i parametri TD2; il valore assoluto di deviazione è fra P40.24~P40.25, i due insiemi dei parametri linearmente transitioned. |
0 | ☆ | ||||||||||||||||
| P40.24 | Devation 1 di cambiamento di parametro di PID | 0.0%~P40-25 | 20,0% | ☆ | ||||||||||||||||
| P40.25 | Devation 2 di cambiamento di parametro di PID | P40-24~100.0% | 80,0% | ☆ | ||||||||||||||||
Prodotti raccomandati

